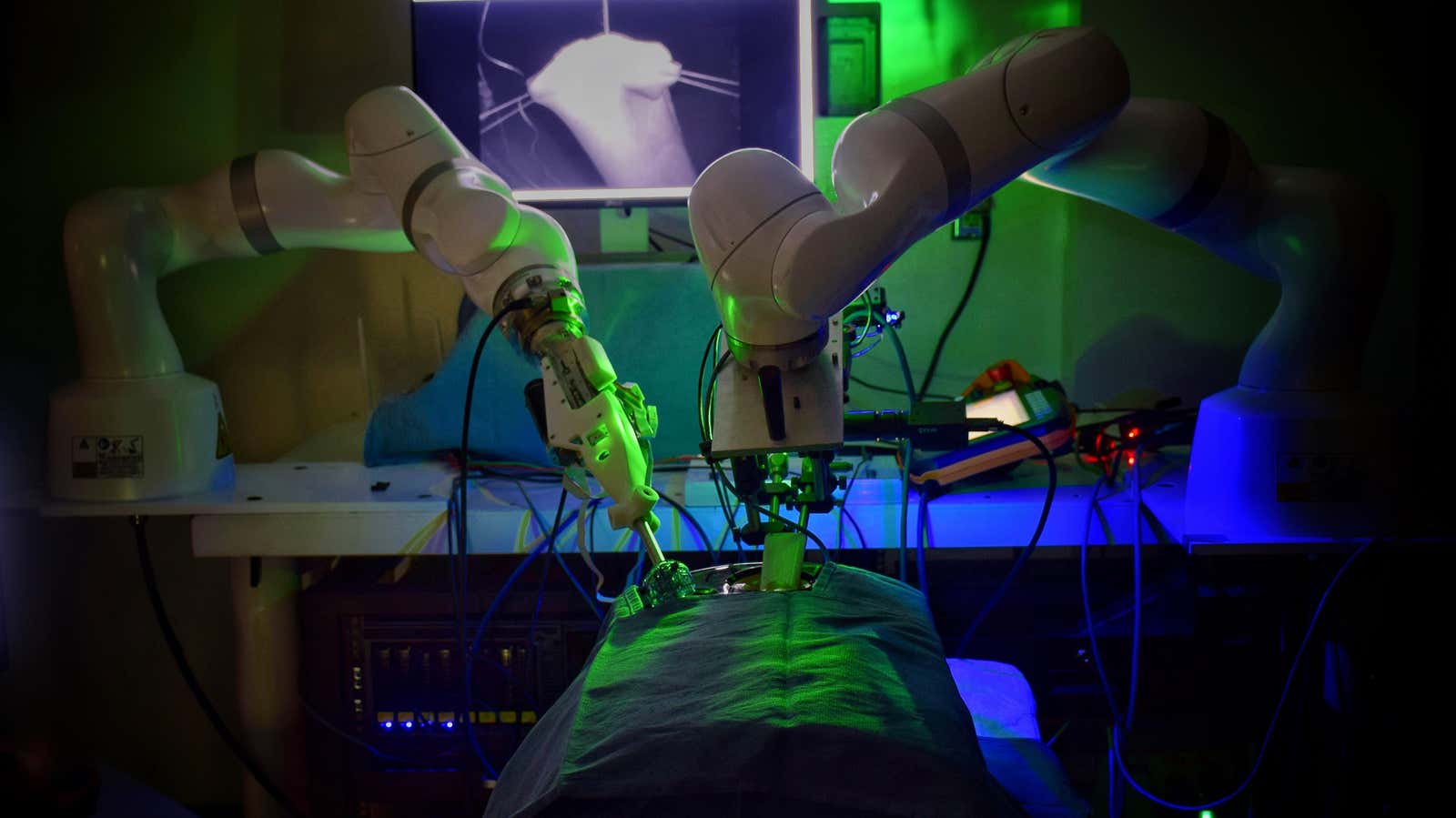
26 января 2022 года в научном издании Sciense Robotics вышел материл о работе автономного робота STAR (Smart Tissue Autonomous Robot), созданного учёными из Университета Джона Хопкинса, США. Установка успешно выполнила лапароскопическую операцию по анастомозу тонкой кишки свиньи.
Лапароскопическая операция также называемая «хирургия замочной скважины» — это процедура для диагностики и лечения заболеваний органов брюшной полости и малого таза. Операцию проводят без разрезов: хирург лишь делает прокол, вводя через него миниатюрные инструменты и камеру для контроля.
По сути, вмешательство такого рода направлено на восстановление целостности кишечника, которая была нарушена из-за удаления его части или его целиком. В этой связи операция требует высокой точности и множества повторяющихся идентичных движений.
Раньше для ее выполнения требовалось вскрытие брюшной полости, но вследствие развития робототехники хирурги перешли на неинвазивный способ. Тем не менее, до текущего момент роботы, такие как Da Vinci, были всего лишь инструментом в руках хирурга.

Теперь учёные из Университета Джона Хопкинса с помощью робота хирурга STAR совершили прорыв в сфере автономности подобных операций — наиболее сложных для освоения робототехникой, поскольку, в отличие от костей или хрящей, мягкие ткани изгибаются, легко меняя положение в пространстве. Так же надо учитывать дыхание пациента во время которого происходит смещение органов брюшной полости. Для этого робота оснастили комбинацией камер структурного света и ближнего инфракрасного, чтобы создать трехмерное изображение операционного поля.
“Мы считаем, что передовая система трехмерного машинного зрения необходима для того, чтобы сделать интеллектуальных хирургических роботов умнее и безопаснее” заявил профессор Джин Кан (Jin Kang).
На основе визуальных данных искусственный интеллект (ИИ) робота с помощью машинного обучения выстраивал дальнейший план операции. Как оказалось, STAR справился со свое задачей значительно лучше врачей. Его швы имели большую повторяемость и аккуратность чем выполняемые хирургами.
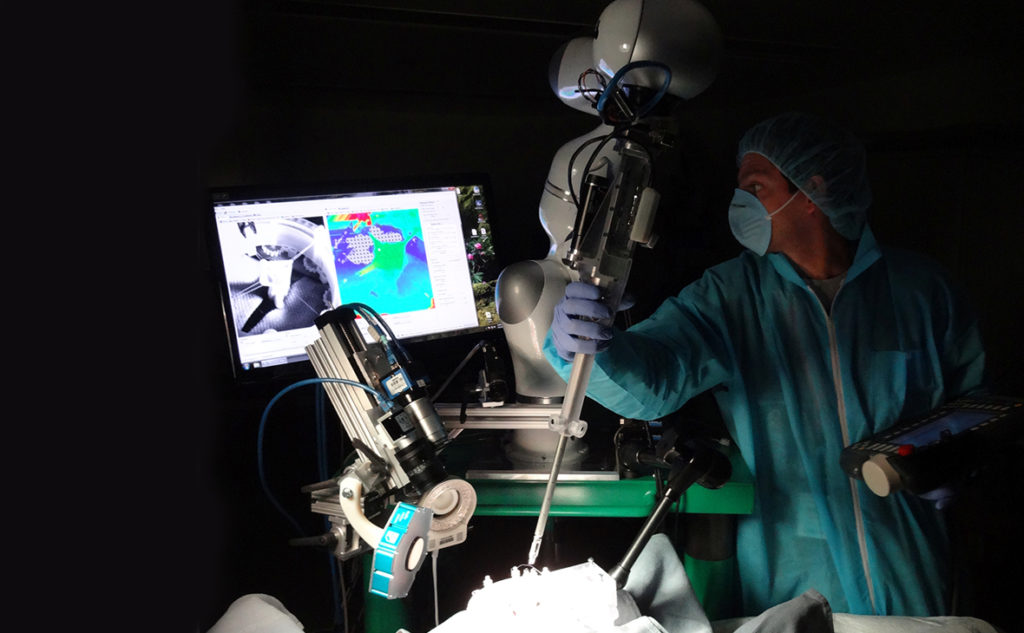
Тем не менее, хирурги контролировали ход операции. Для отслеживания текущей конфигурации оперируемых концов кишечника использовались специальные метки (биосовместимый маркер NIR), положение которых даже сквозь ткани отслеживают инфракрасные камеры. Данные метки пока еще устанавливает человек. Полученные данные позволяют корректировать работу робота в режиме реального времени.
Во время операции был зафиксирована доля случаев (17%) когда робот “советовался” с человеком насчет дальнейшего плана операции.
Коллектив Университета Джона Хопкинса планирует продолжать снижать участие человека в данной операции. Следующим шагом должна стать возможность роботизированного и автономного нанесение меток NIR. Так же в результате дальнейшего машинного обучения робот будет «советоваться» с хирургами все меньше.