Одной из задач японского лунного модуля Slim была отработка технологии точного приземления (с погрешностью не более чем в 100 метров от выбранного места), а не в несколько километров как у аналогичных аппаратов. Slim приземлился на расстоянии в 55 метров от расчетной точки. Задача исследовать грунт Луны осталась под вопросом — в процессе приземления модуль перевернулся и пока не может получить питание от солнечных батарей.
Японское космическое агентство осуществило посадку лунного модуля Slim на поверхность спутника 19 января 2024 года. Во время приземления аппарат находился на связи с Землей и успел передать несколько снимков. Однако почти сразу после посадки стало известно, что солнечные батареи не получают свет и поэтому не могут запитать энергией аккумуляторы аппарата, которые нужны для полноценного функционирования модуля.
Почти сразу стало понятно, что батареи направлены не в ту сторону, где по расчетам они бы получали наибольшее количество солнечного света. Возможно, аппарат перевернулся в процессе приземления. Позже эта информация была подтверждена снимками, полученными с камер модуля, а также снимком, сделанным одним из двух небольших роботов (LEV2), которые отделились от аппарата незадолго до приземления.
На снимке видно посадочный модуль, который стоит вверх ногами, но при этом не выглядит разрушенным.

В японском космическом агентстве считают, что причиной некорректной посадки стал отказ одного из двигателей на высоте в 50 метров. В результате двигатель занял неверное положение в момент контакта с Луной. Именно по причине неправильного положения модуля солнечные батареи не могут функционировать так, как планировалось.
Тем не менее, японское космическое агентство продолжает надеяться, что спустя некоторое время произойдет изменение углов освещения и часть света все-таки попадет на батареи. До тех пор питание модуля будет отключено.

Несмотря на то, что аппарат Slim обесточен и неизвестно, будет ли его питание восстановлено, некоторые итоги миссии можно подвести уже сейчас. Модуль совершил мягкую посадку на поверхность Луны (пусть в процессе и перевернулся) — это большое событие для мира космонавтики, ведь до этого момента только США, России, Китаю и Индии удавалось осуществить подобные операции.
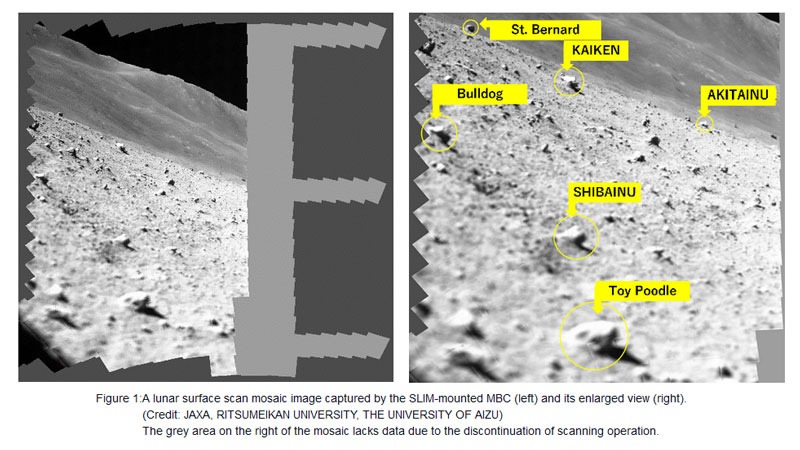
Но помимо мягкой посадки у миссии были и другие задачи. Одной из них является проведение исследовательских работ по изучению лунного грунта. Для этого Slim оснащен специальной камерой, которая может по снимку определить состав поверхностного слоя грунта.
Несмотря на то, что модуль обесточен и не может полноценно функционировать, в первые часы после посадки он сделал несколько снимков и передал их на Землю для дальнейшего изучения. Также в исследовательской работе принимают участие два мини-робота. До тех пор, пока не станет понятен вопрос электропитания модуля, рано судить об результатах его научной деятельности, но тем не менее какую-то часть работ он все же успел выполнить.
Еще одной задачей, которая стояла перед Slim, является отработка технологии точной посадки. Все лунные посадочные модули, которые до этого приземлялись на поверхность спутника, осуществляли маневр приземления с погрешностью в несколько километров. От японского модуля ожидалась погрешность в 100 метров. С этой частью своей миссии он справился. Согласно данным, полученным с индийского орбитального аппарата Chandrayaan-2, Slim сумел приземлиться в 55 метрах от запланированной точки посадки.
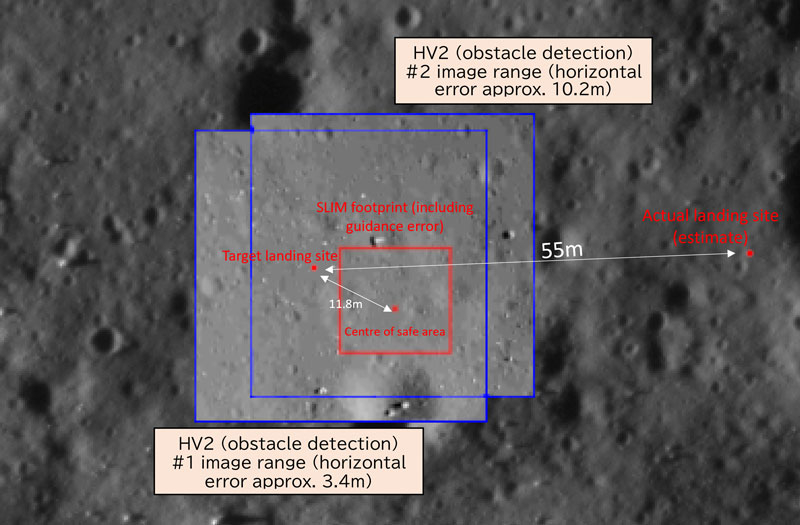
Выполнение столько точной посадки открывает большие возможности для последующих лунных миссий, конечный итог которых подразумевает строительство лунных баз. Сложно стоить аванпост человечества на Луне, когда все твои аппараты будут приземляться на удаление в несколько километров друг от друга. А вот если удастся и дальше сажать их на приемлемом расстоянии друг от друга, то строительство базы станет уже чуточку легче.
Следите за новостями в наших социальных сетях: ВКонтакте и Telegram.